Dual Arduino solution for smooth and effortless stepper motor control
In this video I show you how control a stepper motor via a slave Arduino. The role of the slave Arduino is to reduce the load on the master MCU which is introduced by the stepping code. The stepper motor has to be stepped with a certain frequency, therefore at each step the MCU becomes busy. We can put tasks between two steps, but if the task becomes too time consuming (too long) then it interferes with the stepping and it increases the delay between two steps. When this happens, the speed of the stepper motor becomes uneven due to the uneven delay between the steps. This can be heard as “hiccups” or some sort of hammering noise.
My idea is actually very simple. Let’s build a system with two microcontrollers: a master and a slave MCU. The master communicates with the computer and all the other hardware while the slave only receives the commands from the master and controls the stepper motor. With this solution, the slave’s only job is to take care of the stepper motor and to send a feedback to the master after the job is finished. Thus, the slave is not (over)loaded with other tasks and the motor runs smoothly. Considering the fact that an Arduino Nano cost $3-5, it is a good investment.
I have been using this solution for a while in my DIY tensile testing machine and it works perfectly. The stepper motor control is done with the AccelStepper library. In the tensile testing machine, the master Arduino continuously communicates with the computer, reads and processes the data of a load cell and a DRO and communicates with the slave which only takes care of the stepper motor.
In this demonstration I show you an idea about how to send commands from your computer to the slave Arduino, how to control a stepper motor with the AccelStepper library and how to send some feedback from the slave to the master after the issued task is finished. If you understand this example well, you can build many cool and complex stepper motor related projects.
Wiring diagram
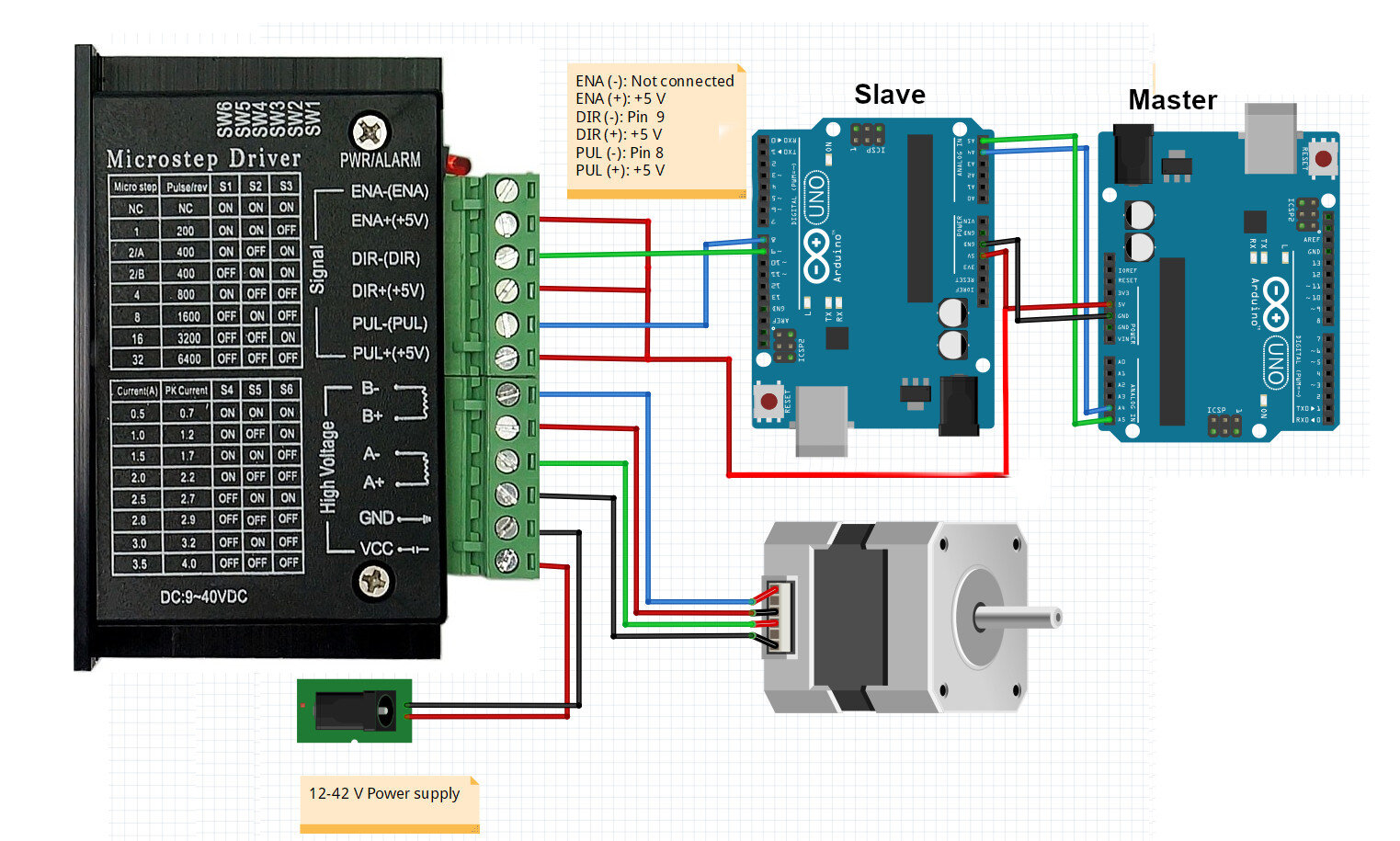
The master Arduino is connected to the computer via USB. The slave Arduino is connected to the master via the A4 and A5 terminals. The master Arduino feeds the slave with power, therefore their 5 V and GND have to be connected together. The slave takes care of the stepper motor, therefore the stepper motor controller (in this case a TB6600) is connected to it. Any kind of stepper motor controller can be connected to the slave. For more example, check this demonstration.
Note: If you connect both Arduinos via USB, do not connect their 5 V together! Only A4, A5 and GND should be connected.
Master source code
//Connections: A4 to A4, A5 to A5 and GND to GND #include <Wire.h> //For Arduino-Arduino communication char receivedCommand; //Command that decides what to do double receivedValue; //Command that determines the amount of steps/speec/acceleration... char ReceivedFromSlave; //received character from the Slave //----------------------------------- bool newData; //bool to indicate new data - This is for the Computer - Master communication (Serial) bool SendToSlave; //bool to indicate when there is data to be sent to the Slave bool MotorIsRunning; //bool to check the status from the Slave Arduino String wireCommand; // the full string to be sent to the Slave //----------------------------------- //Time for non-blocking tasks float TimeNow1; float TimeNow2; void setup() { Serial.begin(9600); //Start Serial Serial.println("This is the Master Arduino that is sending the commands to the Slave"); Wire.begin(8); // Join the i2c bus Wire.onReceive(receiveEvent); // register I2C event delay(2000); TimeNow1 = millis(); //Start time } void loop() { checkSerial(); SendDataToSlave(); TimeNow2 = millis(); //The difference of the two times will increase with every iteration of the loop() if(TimeNow2 - TimeNow1 > 200) // when the difference is > 200, we enter { doSomething(); // we do something TimeNow1 = millis(); //then we refresh TimeNow1 to the current millis value. This "resets the timer" } } //---------------------------------------------------------------------------------- void checkSerial() //This function is taking care of the serial communication between the master and the computer. { if (Serial.available() > 0) { receivedCommand = Serial.read(); //Read the available command newData = true; //Allow the code to enter the next if() } if (newData == true) { switch (receivedCommand) //we check what is the command - we read this a few lines above { case 'R': //R uses the move() function of the AccelStepper library, which means that it moves relatively to the current position. receivedValue = Serial.parseFloat(); //value for the steps SendToSlave = true; // we allow the Master to forward the details to the Slave MotorIsRunning = true; break; case 'r': //r uses the moveTo() function of the AccelStepper library, which means that it moves absolutely to the current position. receivedValue = Serial.parseFloat(); //value for the steps SendToSlave = true; // we allow the Master to forward the details to the Slave MotorIsRunning = true; break; case 'n': // Stops the motor receivedValue = 0; //Manually forcing the value to 0 SendToSlave = true; // we allow the Master to forward the details to the Slave MotorIsRunning = false; break; case 'A': // Updates acceleration receivedValue = Serial.parseFloat(); //receive the acceleration from serial SendToSlave = true; // we allow the Master to forward the details to the Slave MotorIsRunning = false; break; case 'V': // Updates speed receivedValue = Serial.parseFloat(); //receive the acceleration from serial SendToSlave = true; // we allow the Master to forward the details to the Slave MotorIsRunning = false; break; case 'v': // Updates Max speed receivedValue = Serial.parseFloat(); //receive the acceleration from serial SendToSlave = true; // we allow the Master to forward the details to the Slave MotorIsRunning = false; break; default: //skip break; } } newData = false; } void SendDataToSlave() { if(SendToSlave == true) //if the code below is allowed to be performed { Wire.beginTransmission(8); // transmit to Slave //Build up the string that we send to the Slave String wireCommand = String(receivedCommand) + receivedValue; //concatenating string: command character + some value (number) //Checking what we send to the Slave by showing it on the terminal Serial.print("Submitted command: "); Serial.println(wireCommand); Wire.write(wireCommand.c_str()); //Sending the concatenated string to the Slave Wire.endTransmission(); //Finish transmitting SendToSlave = false; //We are not allowed to enter this part of the code until we have new things to send } else { return; // This else might not be necessary } } void receiveEvent(int NumberOfBytes) { while (Wire.available()) { // loop through all received character from the Slave (in this example, there is 1 character only) ReceivedFromSlave = Wire.read();// receive byte as a character if(ReceivedFromSlave == 'd') //d = done { Serial.println("The motor finished the task!"); MotorIsRunning = false; break; //quick way to not finish the whole reading when we want to stop } } } void doSomething() { if(MotorIsRunning == true) { Serial.println("The function is doing something..."); } }
Slave source code
#include <Wire.h> #include <AccelStepper.h> //AccelStepper stepper(1, 11, 12); //With EasyDriver AccelStepper stepper(1, 8, 9); //With TB6600 //------------Variables for the data processing--------------------------------- String str =""; char commandChar; //command character String valueFromChars; //value constructed from the chars char c; //just a simple character bool incomingCommand; //bool that indicates if a command arrived from the Master bool runallowed; //bool that allows the motor to run bool printMessage; // bool that allows to print out the received values from Master //------------Variables for the stepping---------------------------------------- char receivedCommand; //received command charater long receivedValue; //value from the computer long NumberOfSteps; //number of steps which will be passed to the AccelStepper library String receivedString; //the full string received from the Master - this will be split up void setup() { //---Starting up serial------------------------------------------------ Serial.begin(9600); Serial.println("This is the Slave Arduino that is receiving the commands from the Master"); //setting up some default values for (max) speed and maximum acceleration stepper.setSpeed(2000); //SPEED = Steps / second stepper.setMaxSpeed(2000); //SPEED = Steps / second stepper.setAcceleration(500); //ACCELERATION = Steps /(second)^2 (1000) stepper.disableOutputs(); //disable outputs, so the motor is not getting warm (no current) Wire.begin(8); // join i2c bus with address #8 Wire.onReceive(receiveEvent); // register I2C event } void loop() { dataProcess(); dataDisplay(); RunTheMotor(); } void dataDisplay() //this function is only used for checking purposes. { if(printMessage == true) { Serial.println("Received string: "); //full string from Master Serial.println(receivedString); Serial.println("Received character: "); //sliced out command character Serial.println(commandChar); Serial.println("Received value: "); //sliced out number Serial.println(receivedValue); printMessage = false; //reset this, so we don't enter again until a new data comes in } } void dataProcess() { if(incomingCommand == true) { delay(2000); //Waiting time is necessary, otherwise the software doesn't read and arrange the variables properly //delete the strings before constructing the new variables, otherwise the new characters will be appended commandChar =""; valueFromChars =""; commandChar = str.charAt(0); //command is the first character of the string from the Master for (int i = 1; i < str.length(); i++) // i starts from the index 1, since the index 0 is the command character { valueFromChars += str.charAt(i); //the value temporary variable is built up one by one in each iteration } str = ""; //we erase the string what we decomposed above, so upon the new incoming data, we do not combine the old and new data receivedCommand = commandChar; //ReceivedCommand is a "more permanent" variable, so we put the command there receivedValue = valueFromChars.toFloat(); //the receivedValue is a string, so it has to be converted into a number //------------------------------------------------------------------------------------------------------------ switch (receivedCommand) //we check what is the command { case 'R': //R uses the move() function of the AccelStepper library, which means that it moves relatively to the current position. Serial.println("Relative direction."); //print the action NumberOfSteps = receivedValue; //here, the receivedValue is used as the number of steps RotateRelative(); //Run the function //example: R2000 - 2000 steps (5 revolution with 400 step/rev microstepping) break; case 'r': //r uses the moveTo() function of the AccelStepper library, which means that it moves absolutely to the current position. Serial.println("Absolute position."); //print the action NumberOfSteps = receivedValue; //here, the receivedValue is used as the number of steps RotateAbsolute(); //Run the function //example: r800 - It moves to the position which is located at +800 steps away from 0. break; case 'A': // Updates acceleration stepper.setAcceleration(receivedValue); //update the value of the variable - receivedValue is the acceleration Serial.print("New acceleration value: "); //confirm update by message Serial.println(receivedValue); //confirm update by message break; case 'V': // Updates speed stepper.setSpeed(receivedValue); //update the value of the variable - receivedValue is the speed Serial.print("New speed value: "); //confirm update by message Serial.println(receivedValue); //confirm update by message break; case 'v': // Updates Max speed stepper.setMaxSpeed(receivedValue); //update the value of the variable - receivedValue is the max speed Serial.print("New max speed value: "); //confirm update by message Serial.println(receivedValue); //confirm update by message break; case 'L': //L: Location -- implement is later runallowed = false; //we still keep running disabled stepper.disableOutputs(); //disable power Serial.print("Current position is: ");//Print the message Serial.println(stepper.currentPosition()); //Printing the current position in steps. break; case 'U': stepper.setCurrentPosition(0); //Reset current position. "new home" Serial.print("New home position is set."); //Print message Serial.println(stepper.currentPosition()); //Check position after reset. break; default: //skip break; } //after we went through the above tasks, newData is set to false again, so we are ready to receive new commands again. incomingCommand = false; printMessage = true; //next iteration of the loop() will show these values } } void receiveEvent(int NumberOfBytes) { incomingCommand = true; //switching this variable to TRUE, so the dataProcess() function will know that there are new data available to split up into the different variables while (Wire.available()) { // loop through all received character from the Master c = Wire.read();// receive byte as a character if(c == 'n') //if we get the letter n, we do not fool around but immediately shut down the motor { runallowed = false; printMessage = false; Serial.println("STOPPED"); break; //quick way to not finish the whole reading when we want to stop } str = str + c; //appending the characters in order to build a whole string receivedString = str; //the whole string is also passed to another variable which we use for other purposes } } //---------------------------------------------------------------------------------------------------------------- void RunTheMotor() //method for the motor { if (runallowed == true) { if (abs(stepper.distanceToGo()) > 0) //abs() is needed because of the '<' { //we enter this part as long as there are steps to do stepper.enableOutputs(); //enable pins stepper.run(); //step the motor (this will step the motor by 1 step at each loop) } else //program enters this part if the required distance is completed { runallowed = false; //disable running -> the program will not try to enter this if-else anymore stepper.disableOutputs(); // disable power Serial.print("POSITION: "); Serial.println(stepper.currentPosition()); // print pos -> this will show you the latest position from the origin //Send a feedback to the Master Wire.beginTransmission(8); Wire.write('d'); // d = done Wire.endTransmission(); } } else //program enters this part if the runallowed is FALSE, we do not do anything { return; } } void RotateRelative() { //We move X steps from the current position of the stepper motor in a given direction (+/-). runallowed = true; //allow running - this allows entering the RunTheMotor() function. stepper.move(NumberOfSteps); //set relative distance and direction } void RotateAbsolute() { //We move to an absolute position. //The AccelStepper library keeps track of the position. runallowed = true; //allow running - this allows entering the RunTheMotor() function. stepper.moveTo(NumberOfSteps); //set absolute distance }