Building a digital control circuit for the SZBK07 DC-DC buck converter
In this video I continue the previous video's experiment and show you how to control the SZBK07 DC-DC converter with a microcontroller and the MCP41100 digital potentiometer. With this technique, you can control the DC-DC converter with a digital controller. The rotary encoder is used to increase or decrease the value of the bit which is written on the digital potentiometer which results in a voltage between 0 and 5 V on the wiper of the digital potentiometer. With this voltage and with the help of a 10 kOhm resistor, we "inject" the current to the feedback pin of the buck controller and adjust the output voltage of the DC-DC controller. Due to the limited resolution (8 bit) of the MCP41100, the resolution of the output voltage of the DC-DC converter scales with the magnitude of the voltage. Lower voltage can be adjusted in much smaller steps. The maximum output voltage 36 V can be adjusted in 0.14 V steps while an output voltage of 10 V can be adjusted in 0.04 V steps.
Schematics
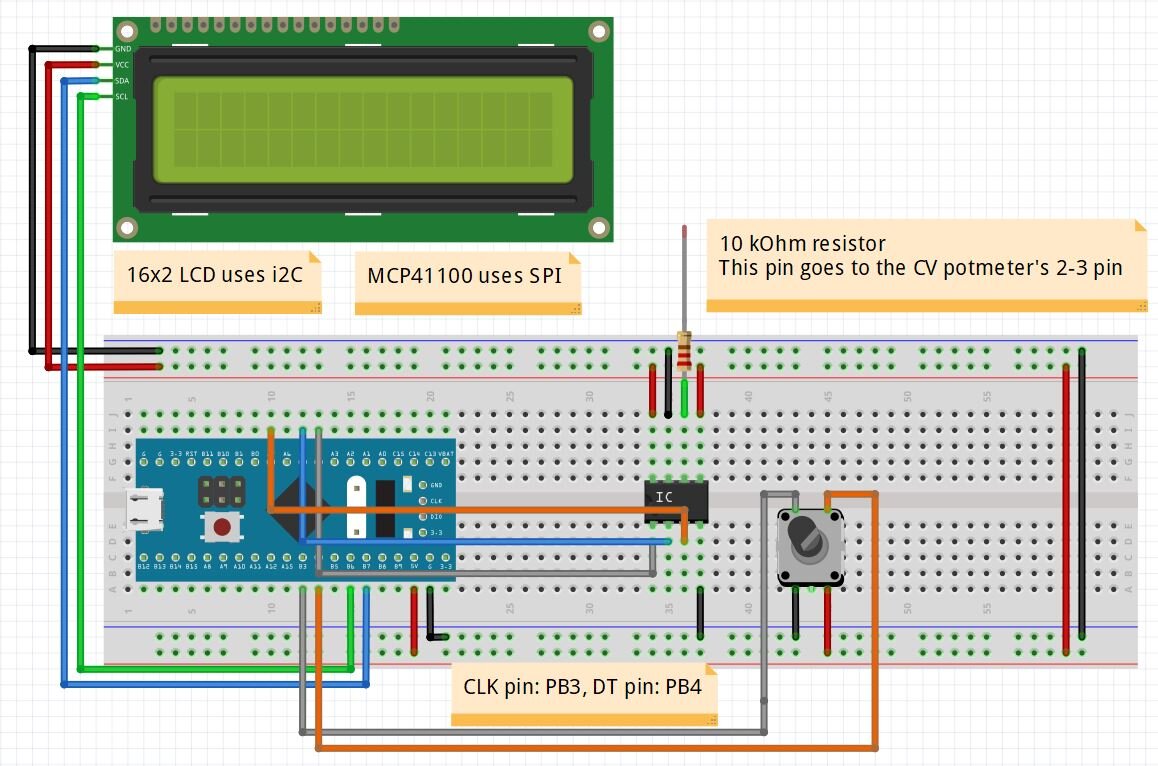
The project is built around an STM32 circuit which takes care of the rotary encoder, the 16x2 LCD and the MCP41100 8 bit digital potentiometer. The rotary encoder changes the value of a variable between 0-255 which is then forwarded to the MCP41100 and causes a change in the output voltage of the wiper. This output voltage is then goes to the pin 2 or 3 of the CV trimmer potmeter on the SZBK07 DC-DC converter through a 10 kOm resistor.

The 10 kOhm resistor from the left hand side picture is connected to the pin 2 or 3 of the CV trimmer potentiometer. They are connected together on the PCB, so it does not matter which pin you use.
STM32/Arduino source code
//STM32-based digital potmeter #include <SPI.h> //SPI comunication //SPI on STM32: MOSI: PA7, SCK: PA5 //SPI on Arduino: MOSI: 11, SCK: 13 //16x2 LCD #include <LiquidCrystal_I2C.h> //SDA = B7[A4], SCL = B6[A5] STM32/[Arduino] LiquidCrystal_I2C lcd(0x27, 16, 2); const byte CS1_pin = PA4; //CS pin for potmeter (Pick any on Arduino, Pin 10 is the "default") float nominalVoltage = 0; //Calculated voltage, based on the 8-bit value int counter_1 = 0; //counter for the potmeter 1 - 0-255 bit value //Defining pins const int RotaryCLK = PB3; //CLK pin on the rotary encoder const int RotaryDT = PB4; //DT pin on the rotary encoder //Statuses for the rotary encoder int CLKNow; int CLKPrevious; int DTNow; int DTPrevious; // Time float TimeNow1; float TimeNow2; void setup() { Serial.begin(9600); //serial communication Serial.println("SZKB07 digital control"); //message on serial port pinMode(CS1_pin, OUTPUT); //Chip select is an output digitalWrite(CS1_pin, HIGH); //Select potmeter //------------------------------------------------------ lcd.begin(); // initialize the lcd lcd.backlight(); //------------------------------------------------------ lcd.setCursor(0,0); //Defining positon to write from first row,first column . lcd.print(" Digital SZKB07"); lcd.setCursor(0,1); //Second row, first column lcd.print(" MCP41100 "); //You can write 16 Characters per line . delay(3000); //wait 3 sec //------------------------------------------------------ //Store states of the rotary encoder CLKPrevious = digitalRead(RotaryCLK); DTPrevious = digitalRead(RotaryDT); attachInterrupt(digitalPinToInterrupt(RotaryCLK), rotate, CHANGE); //CLK pin is an interrupt pin //On STM32, you can pick any pin basically. On Arduino Uno and Nano, it is only Pin 2 and 3. TimeNow1 = millis(); //Start time SPI.begin(); //start SPI for the digital potmeter } void loop() { TimeNow2 = millis(); if(TimeNow2 - TimeNow1 > 200) //update LCD every 200 ms { printLCD(); TimeNow1 = millis(); } writePotmeter(); //write the potmeter value in every loop } void writePotmeter() { //CS goes low digitalWrite(CS1_pin, LOW); SPI.transfer(0x11); //command 00010001 [00][01][00][11] SPI.transfer(counter_1); //transfer the integer value of the potmeter (0-255 value) delayMicroseconds(100); //wait Serial.print("counter_1: "); //send the data to the computer Serial.println(counter_1); //CS goes high digitalWrite(CS1_pin, HIGH); //nominal voltage, based on the 5 V rail voltage and the counter_1 value nominalVoltage = counter_1 * 5.0 / 256.0; //5 V might not be 5.000 V exactly } void rotate() { CLKNow = digitalRead(RotaryCLK); //Read the state of the CLK pin // If last and current state of CLK are different, then a pulse occurred if (CLKNow != CLKPrevious && CLKNow == 1){ // If the DT state is different than the CLK state then // the encoder is rotating A direction: increase if (digitalRead(RotaryDT) != CLKNow) { if(counter_1 < 256) { counter_1++; //increase counter by 1 } else { //Don't let it go above 255 } } else { // Encoder is rotating B direction so decrease if(counter_1 < 1) { // Don't let it go below 0 } else { counter_1--; //decrease counter by 1 } } } CLKPrevious = CLKNow; // Store last CLK state } void printLCD() { //lcd.clear(); lcd.setCursor(0,0); // Defining positon to write from first row, first column . lcd.print("Pot level: "); lcd.setCursor(11,0); lcd.print(" "); lcd.setCursor(11,0); lcd.print(counter_1); //Print the number of button clicks lcd.setCursor(0,1); // Defining positon to write from second row, first column . lcd.print("Voltage: "); lcd.setCursor(9,1); lcd.print(" "); lcd.setCursor(9,1); lcd.print(nominalVoltage); //Print the number of pulses } /* * Resistance formula * R = 100 kOhm *(256-x)/256 + Rw * Rw = 125 for the 100 kOhm * / */