Advanced menu system with rotary encoder
In this video I show you my improved menu system for Arduino/STM32. The code works on both microcontroller thanks to the STM32duino. By using a rotary encoder and a button, we can navigate on the display (20x4 LCD) and select a menu, then modify the value of a variable based on the selected menu. This will be useful for my future projects where I need to set up different target values and perform something based on the values. The 20x4 LCD allows us more freedom as the 16x2 LCD.
Arduino / STM32 source code
//20x4 LCD #include <LiquidCrystal_I2C.h> //SDA = B7[A4], SCL = B6[A5] STM32/[Arduino] LiquidCrystal_I2C lcd(0x27, 20, 4); int menuCounter = 0; //counts the clicks of the rotary encoder between menu items (0-3 in this case) int menu1_Value = 0; //value within menu 1 int menu2_Value = 0; //value within menu 2 int menu3_Value = 0; //value within menu 3 int menu4_Value = 0; //value within menu 4 bool menu1_selected = false; //enable/disable to change the value of menu item bool menu2_selected = false; bool menu3_selected = false; bool menu4_selected = false; //Note: if a menu is selected ">" becomes "X". //Defining pins //Arduino interrupt pins: 2, 3. const int RotaryCLK = PB3; //CLK pin on the rotary encoder const int RotaryDT = PB4; //DT pin on the rotary encoder const int PushButton = PB5; //Button to enter/exit menu //Statuses for the rotary encoder int CLKNow; int CLKPrevious; int DTNow; int DTPrevious; bool refreshLCD = true; //refreshes values bool refreshSelection = false; //refreshes selection (> / X) void setup() { pinMode(PB3, INPUT_PULLUP); //RotaryCLK pinMode(PB4, INPUT_PULLUP); //RotaryDT pinMode(PB5, INPUT_PULLUP); //Button //------------------------------------------------------ lcd.begin(); // initialize the lcd lcd.backlight(); //------------------------------------------------------ lcd.setCursor(0,0); //Defining positon to write from first row, first column . lcd.print("Menu demo"); lcd.setCursor(0,1); //Second row, first column lcd.print("Rotary encoder"); lcd.setCursor(0,2); //Second row, first column lcd.print("Improved version"); delay(5000); //wait 2 sec lcd.clear(); //clear the whole LCD printLCD(); //print the stationary parts on the screen //------------------------------------------------------ //Store states of the rotary encoder CLKPrevious = digitalRead(RotaryCLK); DTPrevious = digitalRead(RotaryDT); attachInterrupt(digitalPinToInterrupt(RotaryCLK), rotate, CHANGE); //CLK pin is an interrupt pin attachInterrupt(digitalPinToInterrupt(PushButton), pushButton, FALLING); //PushButton pin is an interrupt pin } void loop() { if(refreshLCD == true) //If we are allowed to update the LCD ... { updateLCD(); // ... we update the LCD ... //... also, if one of the menus are already selected... if(menu1_selected == true || menu2_selected == true || menu3_selected == true || menu4_selected == true) { // do nothing } else { updateCursorPosition(); //update the position } refreshLCD = false; //reset the variable - wait for a new trigger } if(refreshSelection == true) //if the selection is changed { updateSelection(); //update the selection on the LCD refreshSelection = false; // reset the variable - wait for a new trigger } } void rotate() { //-----MENU1-------------------------------------------------------------- if(menu1_selected == true) { CLKNow = digitalRead(RotaryCLK); //Read the state of the CLK pin // If last and current state of CLK are different, then a pulse occurred if (CLKNow != CLKPrevious && CLKNow == 1) { // If the DT state is different than the CLK state then // the encoder is rotating in A direction, so we increase if (digitalRead(RotaryDT) != CLKNow) { if(menu1_Value < 100) //we do not go above 100 { menu1_Value++; } else { menu1_Value = 0; } } else { if(menu1_Value < 1) //we do not go below 0 { menu1_Value = 100; } else { // Encoder is rotating B direction so decrease menu1_Value--; } } } CLKPrevious = CLKNow; // Store last CLK state } //---MENU2--------------------------------------------------------------- else if(menu2_selected == true) { CLKNow = digitalRead(RotaryCLK); //Read the state of the CLK pin // If last and current state of CLK are different, then a pulse occurred if (CLKNow != CLKPrevious && CLKNow == 1) { // If the DT state is different than the CLK state then // the encoder is rotating in A direction, so we increase if (digitalRead(RotaryDT) != CLKNow) { if(menu2_Value < 100) //we do not go above 100 { menu2_Value++; } else { menu2_Value = 0; } } else { if(menu2_Value < 1) //we do not go below 0 { menu2_Value = 100; } else { // Encoder is rotating in B direction, so decrease menu2_Value--; } } } CLKPrevious = CLKNow; // Store last CLK state } //---MENU3--------------------------------------------------------------- else if(menu3_selected == true) { CLKNow = digitalRead(RotaryCLK); //Read the state of the CLK pin // If last and current state of CLK are different, then a pulse occurred if (CLKNow != CLKPrevious && CLKNow == 1) { // If the DT state is different than the CLK state then // the encoder is rotating in A direction, so we increase if (digitalRead(RotaryDT) != CLKNow) { if(menu3_Value < 100) //we do not go above 100 { menu3_Value++; } else { menu3_Value = 0; } } else { if(menu3_Value < 1) //we do not go below 0 { menu3_Value = 100; } else { // Encoder is rotating B direction so decrease menu3_Value--; } } } CLKPrevious = CLKNow; // Store last CLK state } //---MENU4---------------------------------------------------------------- else if(menu4_selected == true) { CLKNow = digitalRead(RotaryCLK); //Read the state of the CLK pin // If last and current state of CLK are different, then a pulse occurred if (CLKNow != CLKPrevious && CLKNow == 1) { // If the DT state is different than the CLK state then // the encoder is rotating in A direction, so we increase if (digitalRead(RotaryDT) != CLKNow) { if(menu4_Value < 100) //we do not go above 100 { menu4_Value++; } else { menu4_Value = 0; } } else { if(menu4_Value < 1) //we do not go below 0 { menu4_Value = 100; } else { // Encoder is rotating in B direction, so decrease menu4_Value--; } } } CLKPrevious = CLKNow; // Store last CLK state } else //MENU COUNTER---------------------------------------------------------------------------- { CLKNow = digitalRead(RotaryCLK); //Read the state of the CLK pin // If last and current state of CLK are different, then a pulse occurred if (CLKNow != CLKPrevious && CLKNow == 1) { // If the DT state is different than the CLK state then // the encoder is rotating in A direction, so we increase if (digitalRead(RotaryDT) != CLKNow) { if(menuCounter < 3) //we do not go above 3 { menuCounter++; } else { menuCounter = 0; } } else { if(menuCounter < 1) //we do not go below 0 { menuCounter = 3; } else { // Encoder is rotating CW so decrease menuCounter--; } } } CLKPrevious = CLKNow; // Store last CLK state } //Refresh LCD after changing the counter's value refreshLCD = true; } void pushButton() { switch(menuCounter) { case 0: menu1_selected = !menu1_selected; //we change the status of the variable to the opposite break; case 1: menu2_selected = !menu2_selected; break; case 2: menu3_selected = !menu3_selected; break; case 3: menu4_selected = !menu4_selected; break; } refreshLCD = true; //Refresh LCD after changing the value of the menu refreshSelection = true; //refresh the selection ("X") } void printLCD() { //These are the values which are not changing the operation lcd.setCursor(1,0); //1st line, 2nd block lcd.print("Menu 1"); //text //---------------------- lcd.setCursor(1,1); //2nd line, 2nd block lcd.print("Menu 2"); //text //---------------------- lcd.setCursor(1,2); //3rd line, 2nd block lcd.print("Menu 3"); //text //---------------------- lcd.setCursor(1,3); //4th line, 2nd block lcd.print("Menu 4"); //text //---------------------- lcd.setCursor(13,0); //1st line, 14th block lcd.print("cnt: "); //counts - text } void updateLCD() { lcd.setCursor(17,0); //1st line, 18th block lcd.print(menuCounter); //counter (0 to 3) lcd.setCursor(9,0); //1st line, 10th block lcd.print(" "); //erase the content by printing space over it lcd.setCursor(9,0); //1st line, 10th block lcd.print(menu1_Value); //print the value of menu1_Value variable lcd.setCursor(9,1); lcd.print(" "); lcd.setCursor(9,1); lcd.print(menu2_Value); // lcd.setCursor(9,2); lcd.print(" "); lcd.setCursor(9,2); lcd.print(menu3_Value); // lcd.setCursor(9,3); lcd.print(" "); lcd.setCursor(9,3); lcd.print(menu4_Value); // } void updateCursorPosition() { //Clear display's ">" parts lcd.setCursor(0,0); //1st line, 1st block lcd.print(" "); //erase by printing a space lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,2); lcd.print(" "); lcd.setCursor(0,3); lcd.print(" "); //Place cursor to the new position switch(menuCounter) //this checks the value of the counter (0, 1, 2 or 3) { case 0: lcd.setCursor(0,0); //1st line, 1st block lcd.print(">"); break; //------------------------------- case 1: lcd.setCursor(0,1); //2nd line, 1st block lcd.print(">"); break; //------------------------------- case 2: lcd.setCursor(0,2); //3rd line, 1st block lcd.print(">"); break; //------------------------------- case 3: lcd.setCursor(0,3); //4th line, 1st block lcd.print(">"); break; } } void updateSelection() { //When a menu is selected ">" becomes "X" if(menu1_selected == true) { lcd.setCursor(0,0); //1st line, 1st block lcd.print("X"); } //------------------- if(menu2_selected == true) { lcd.setCursor(0,1); //2nd line, 1st block lcd.print("X"); } //------------------- if(menu3_selected == true) { lcd.setCursor(0,2); //3rd line, 1st block lcd.print("X"); } //------------------- if(menu4_selected == true) { lcd.setCursor(0,3); //4th line, 1st block lcd.print("X"); } }
Schematics
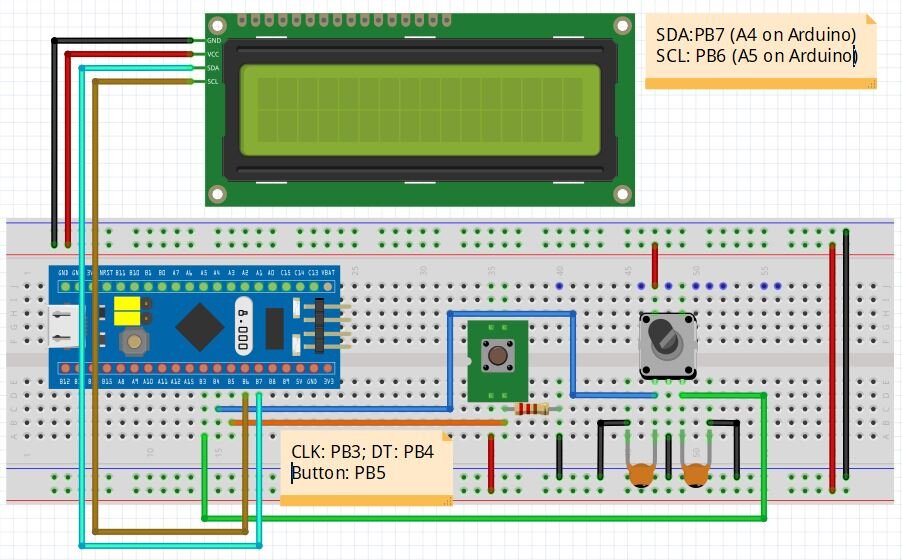
Notice: The illustration shows a 16x2 display, but the code works with a 20x4!
The push button and the rotary encoder is connected to the microcontroller using the PB3, PB4 and PB5 pins. The rotary encoder has 2 100 nF capacitors connected to it. One is between the CLK and GND pins and the other is between the DT and GND pins. This should help to debounce it. The Keyes KY-040 have two 10 kOhm resistors on the PCB by default. The button uses a 4.7 kOhm resistor. Note that for Arduino, you need to use different pins for the interrupt. The display (20x4 LCD!) is using the i2C protocol. You can see the connections for both Arduino and STM32.